
盘点那些脑洞大开的人类设计的“异形”机器人
人类的想象力有多大,设计出来的机器人就有多奇葩。

一旦提起机器人,大多数人首先想到的都是仿人机器人,拥有和人类相似的四肢和头部,甚至是能产生“恐怖谷效应”的机器人。另外,还有很多仿生机器人因为仿自大自然千奇百怪的动物而显得与众不同。并且这些机器人界另类的朋友都拥有一些有趣的技能。
一位来自中科院自动化所复杂系统国家重点实验室的研究生整理了近年来九种典型的陆地仿生机器人。
1、Big Dog(大狗机器人)

这款机器人是波士顿动力学工程公司Boston Dynamics专门为美国军队研究设计。
目前来看,这部机器人可以的算是四足机器人中最具有代表性的一种防生器人了。大狗具有良好的负重能力,平稳性和鲁棒性极好,可以帮助人类承担运送弹药和物资等的任务,由于可以跑得比人类还快,而且具有钢铁之躯,所以可以作为良好的战斗前锋队,并且其身上装有视觉以及定位系统,可以很好的完成跟随等任务。美军正在将阿富汗作为测试大狗试验场。

通过对大狗在雪地、泥地以及岩石琐屑等恶劣地质条件下的测试得到, 大狗可以跳跃至1.1米的高度,携带154千克的重物,并且可以完成路程10千米,时长约2.5小时的长途跋涉。
其实,波士顿动力还推出里一款小狗机器人(LittleDog),这款机器人主要是用于一些基础研究,例如对电机的学习,对动力的控制,对环境的感知,以及轮胎式运动(其脚部采用轮式)。小狗身体内的主机可以通过传感器采集到关节角,电机电流,身体朝向,以及脚掌与地面的应力。其已经在麻省理工,斯坦福,卡内基梅隆,南加州等大学作为DARPA资助下的的一项研究被广泛利用。
2、Cheetah(猎豹机器人)

猎豹机器人做的比较好的机构主要有两家,一个是波士顿动力,一个是麻省理工学院。
波士顿动力的猎豹机器人通过背后的铰链关节的来回运动,通过改变运动的步长和步频来实现机器人速度的改变,这里的灵感也正是来自以模仿真实动物的运动特性。目前波士顿动力的猎豹机器人在实验室的一台跑步机上完成这各项试验。在跑步机上,Cheetah通过一台液压泵进行动力提供。下一代的猎豹机器人,又名WildCat(野猫),将会离开绳索的牵绊,在陆地上真正的跑动起来。目前波士顿动力的猎豹机器人是世界上运动速度最快的腿式机器人,约为29迈,打破了MIT在1989年创下的13.1迈的历史记录。Cheetah目前受美国国防高级研究计划局(DARPA)的最大限度移动和操控项目(Maximum Mobility and Manipulation program)的资助。
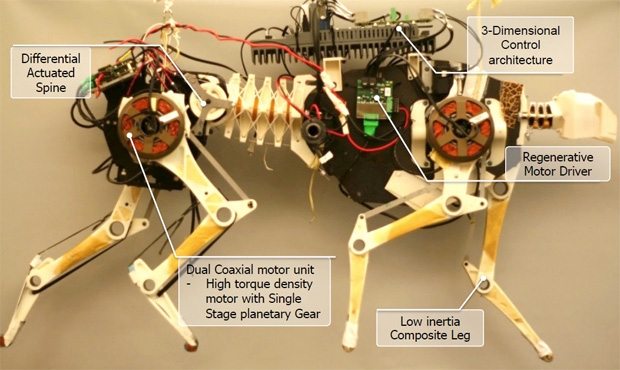
MIT Cheetah通过研究真实生物的肌腱结构,认为肌腱结构能够减小冲击力,增加了腿部的强度。通过有限元分析,研究人员设计了类似的肌腱结构足部,并在两个肌腱之间加入了弹簧以增加一定的柔顺性。这就使得MIT Cheetah具有十分出色的弹跳及越障能力。而且通过对关节处驱动电机的改装以及尾巴的加入,使得MIT Cheetah拥有高速奔跑的能力和良好的平衡性。通过实验,其可以在8.3千米每小时的速度下奔跑2.23小时,或者运用3千克的电池跑10千米。
3、壁虎机器人

做壁虎机器人的机构比较多,目前比较成熟的是斯坦福大学的Stickybot三代以及波士顿动力的RiSE。
Stickybot三代是在Stickybot平台上发展起来的,它有四条腿,每条腿有四个自由度,其中包括了在垂直墙上进行攀爬的主要部位——腕部。
由于壁虎可以沿着垂直墙面进行爬行,也自然被拿来作为仿生的对象。壁虎机器人能吸附在墙上的主要原理是,在每个吸力手上,都有数百万根由人造橡胶制造的毛发,每根细毛的直径大约只有500个纳米左右,长度则只有不到2微米,毛发和垂直表面分子们之间会产生分子弱电磁引力,也叫“范德瓦尔斯力”。这个力可以使壁虎机器人吸附到垂直面上。
Stickybot III体长36厘米,速度5厘米每秒;RiSE体长25厘米,速度30厘米每秒。壁虎机器人由于其可以吸附在墙上行走的特性,可以代替人类来执行反恐侦查、地震搜救等“高难度”的任务。
4、袋鼠机器人
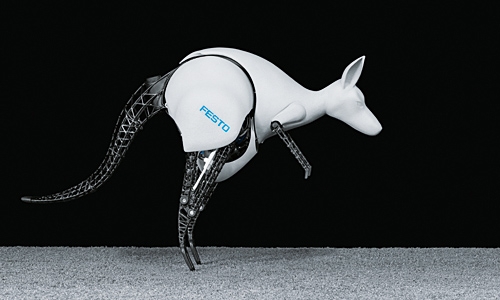
袋鼠机器人由仿生机器人领域的又一重量级公司FESTO研发而成。
袋鼠机器人的动力系统为气动,主控板是电源供电,它腿部的 “肌腱”,是一种压缩空气贮存器,可以帮助它精确平稳地奔跑或着地。在触地爪部内层的压缩空气推力作用下,实现向上向前地跳跃动作。腿向后蹬,袋鼠机器人就能够前进。而在空中的时候,其又会收回到前方。这款机器人每完成一次跳跃动作,其爪部便会储存空气能量以继续下一次的跳跃动作。为了支持这系列动作的持续,研发人员在袋鼠机器人两只触地的支撑脚上安装了固定的弹簧装置,以此来模仿真实袋鼠动物脚上的两根蹄筋,为一次又一次的跳跃动作起到缓和作用。
这款机器人身高超过1米,体重约合7千克,其每次实现的跳跃动作大致在40厘米高、80厘米长的范围内。
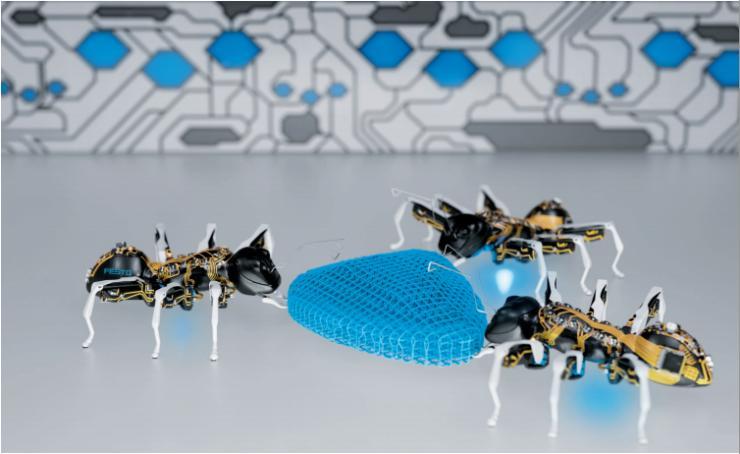
5、蚂蚁机器人

蚂蚁机器人同样是FESTO公司研发而成。
整款机器人不仅是对真是蚂蚁单独的仿生,另一个重大的突破和创新是蚂蚁机器人运用了复杂的控制算法对蚁群的运动进行的模拟。
蚂蚁机器人让我们看到了在不同的情况下,单个的蚂蚁机器人如何独立地作出反应,相互配合并作为一个整体的联网系统。通过一起推与拉,蚂蚁机器人将移动的对象穿过指定区域。由于对工作的智能划分,才使得负载得到了有效的运输,而对单个的机器蚂蚁来说这是个根本不能完成的任务。
然而,蚂蚁机器人不仅具有惊人的合作行为,而且它们的生产方式也是非常独特的。
首先,对部件进行激光烧结,随后点缀可见导体结构,即所谓的3D MID过程。电路是附着在机构表面上的,所以需要同时满足设计和电气功能上的需求。以这种方式,所有的技术组件可以安装在蚂蚁的身体里或者表面,并进行精确地相互配合。投产后运行,不再需要外部控制系统。但是我们同样可以通过无线的方式对蚂蚁机器人的参数进行调节和干预。
6、螳螂机器人

螳螂机器人是由英国汉普郡工程师丹顿(Matt Denton)于2012年3月制造完成的。
它是一种外形类似螳螂的步行机器人,有六条腿,高2.8米、宽5米,1.9吨重,最高速度达到1千米每小时。截至目前,它还是世界上最大的全地形六足机器人。
机器螳螂由一台2.2公升的涡轮增压柴油发动机提供动力,站起来有2.8米高。其可以由人驾驶,也可以选择使用无线技术远程遥控它,其运动能够适应各种地形。螳螂机器人使用的液压技术,阀门、管道以及各种配件,全部在计算机的控制之下,其每分钟就要使用150升的液体。
7、海龟机器人

由Disney Research 联同苏黎世联邦理工学院学生所开发的这款仿海龟机器人名为BeachBot。
BeachBot长不到2英尺,宽和高不足15英寸,目前主要用于沙滩作画,7个电机可以帮助BeachBot把耙子部署到位,描出宽度从2英寸到15英寸不等的艺术画笔效果,球形状的气球轮子让机器人遍历所有类型的沙滩而不留痕迹,以免毁坏沙画。
8、软体机器人

软体机器人是一种新型柔韧机器人,可以仅用空气来驱动。科学家最新研究的软体机器人是采用纸质和硅橡胶制成,能够弯曲、扭转和抓起自身重量100多倍的物体。软体机器人的设计灵感是模仿人类的内部构造或昆虫的外形架构等,尤其是后者。
例如麻省理工大学研究出了蚯蚓机器人,蚯蚓通过反复的伸缩拉伸肌肉在地上爬行,每伸缩一下就向前挪一步;蜗牛和海参也利用这种被称为“蠕动”的运动原理来活动,而我们的胃肠道也做着相同的动作,通过肌肉的伸缩,沿着食道把食物送入胃里。它通过身体各部位的伸缩,在地面上爬行,看起来非常像蚯蚓。这台几乎完全由柔软材料制成的机器人非常富有弹性,即便用锤子狠狠砸它,它也能毫发无损的全身而退。研究人员将它起名为Meshworm(网眼虫)。

又如美国塔夫斯大学开发、已经获得美国国防部高级研究计划署资助的330万美元的研究经费的毛毛虫机器人。这款机器人用了两个月时间建造完成,长12.7厘米,通过抽吸空气进入肢体,可独立地控制它的四肢运动,通过手动或者计算机控制,该机器人具备爬行和滑动等动作。实验结果显示,这种柔体机器人能够灵活自如地往返15次穿梭于这一间隙。多数情况下,柔体机器人往返一次不足1分钟。它能够非常顽强地适应各种环境,它能够穿越各种材料表面,例如:毡布、碎砾、泥泞,甚至是果冻。
9、其他一些仿生机器人
在TED美国国家航空和航天局NASA会议上,弗吉尼亚理工大学的“机器人技术与机械实验室(RoMeLa)”主任Dennis Hong,介绍了他的团队在RoMeLa所制造的七种获过奖的全地形机器人,其中不乏一些出色的仿生机器人。
STriDER (Self-excited Tripedal Dynamic Experimental Robot)是一种三条腿的机器人,利用动能和势能的转化进行运动,灵感来源于威尔斯小说《世界大战》里的一种三腿生物。

MARS (Multi-Appendage Robotic System)是一种具有六只腿的机器人,采用自适应的控制算法可以在沙地等恶劣环境下进行行走,并驮载一定的负荷。
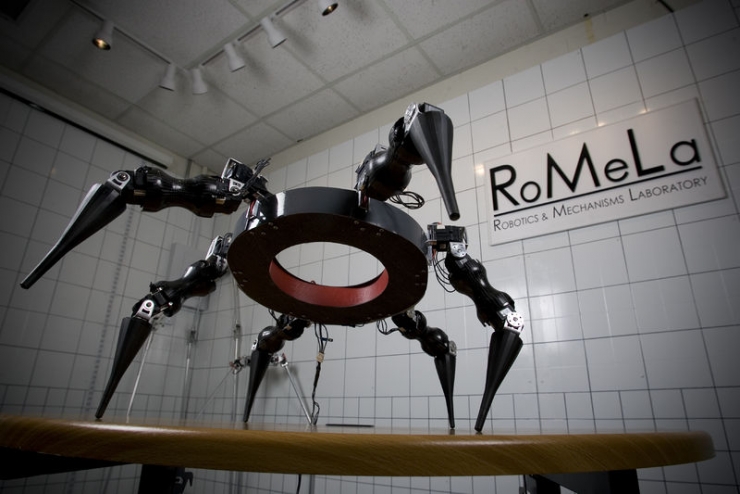
IMPASS (Intelligent Mobility Platform with Active Spoke System)采用的是轮式腿,是一种带有驱动辐条系统的移动平台,这种足部特性使其具有出色的越障能力。

HyDRAS则主要利用模仿蛇的身体扭转完成爬树的高难运动

总结:在过去、现在甚至未来,对仿生机器人的研究都是多元化的,这一篇主要介绍的是陆地机器人。我们通过对自然界的天才们进行观察和研究后,利用他们经过数百年进化后得到的出色的外形特点与运动特性而设计出的仿生机器人。这些机器人很多都可以用来充当我们人类助手,通过它们来完成我们人类不能完成的一些任务。所以,既要发展模仿人的机器人,又要发展模仿其他生物的机器。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker
 长按识别二维码关注
长按识别二维码关注
硬科技产业媒体
关注技术驱动创新
 机器人
机器人