
康奈尔大学发明柔性机械手,用恰到好处的力度握住物体
除了握住物体,该机械手还能检测其形状和纹理。
近日,康奈尔大学的研究人员发明了一种柔软的机器人手,不同于普通机械手所使用的马达,该柔性机械手的关节处所使用的是传导光线。
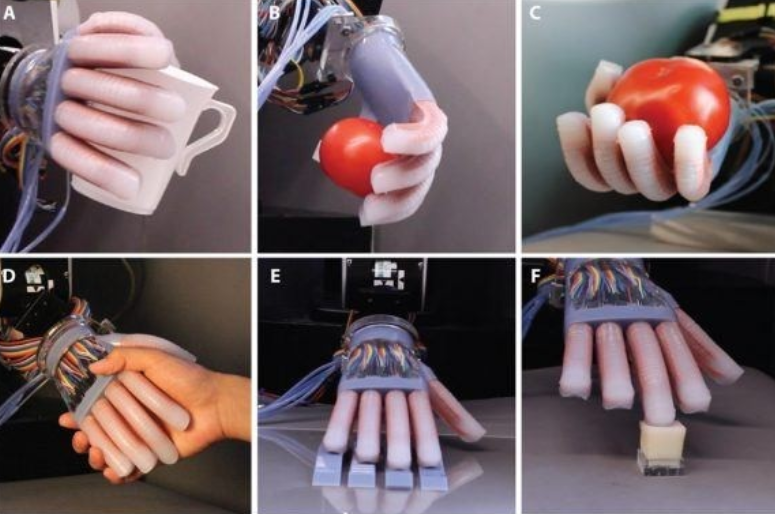
据悉,这个柔性机械手的内部有很多传感器,且每个手指内部都装有波导装置。当机械手触摸物体时,手指内部的波导就会发生弯曲变化,促使机器人收集触摸对象的相关数据。在对所搜集到的数据进行分析处理之后,机械手就可以确定抓取方式,利用这种方法,在工作的时候,这款柔性机器人可以以恰到好处的力度来握住物体,并检测其形状和纹理。
当前,机器人市场逐渐扩大,尤其是在工业领域,大多生产线已被刚性机械臂所取代。然而,在某些时候,刚性机器人并不能全面的满足人们的需要,与此处相对的,柔性机器人成了一个新的发展方向。

相对于刚性机器人,柔性机器人的优势在于成本相对较低,且能够更好的适应环境,当受到外界冲击后,其自身也不会产生大的伤害,在医疗、军事以及探测等领域,其都能发挥不小的作用。
此外,也有不少业内人士表示,软体机器人比刚性机器人拥有更强的计算能力。目前,不少团队都在往柔性机器人方向靠拢,并公布了相关成果,比如哈佛大学工程师开发的一种以碳纳米管为基础的人造肌肉,又比如我国中科新松公司研制的七轴柔性多关节机器人。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker
 长按识别二维码关注
长按识别二维码关注
硬科技产业媒体
关注技术驱动创新
 刚性机器人
机器人
柔性机器人
刚性机器人
机器人
柔性机器人