
科学家打造蝙蝠机器人,未来将用于工地监工
相对于无人机,蝙蝠机器人的实用性似乎更大。
近年来,随着人工智能技术的发展,仿生机器人越来越多的出现在人们面前,其中以地上跑的居多。而在近期,或许是无人机市场的刺激,飞行类仿生机器人的研制也渐渐起步。
据外媒报道,来自伊利诺伊大学和加州理工学院的Alireza Ramezani、Soon-Jo Chung和Seth Hutchinson为机器人装上了一对翅膀,打造了一台名为“B2”的蝙蝠机器人。
说到该机器人的研制初衷,据研究人员之一、伊利诺伊大学工程学教授Hutchinson表示,主要是因为蝙蝠在飞行过程中具有无与伦比的敏捷性和机动性,能够在建筑工地周边实时监测工程进行中的准确性,而与无人机相比,主要依赖于空气动力学进行滑行的蝙蝠机器人能耗更低,飞行时间也更长。
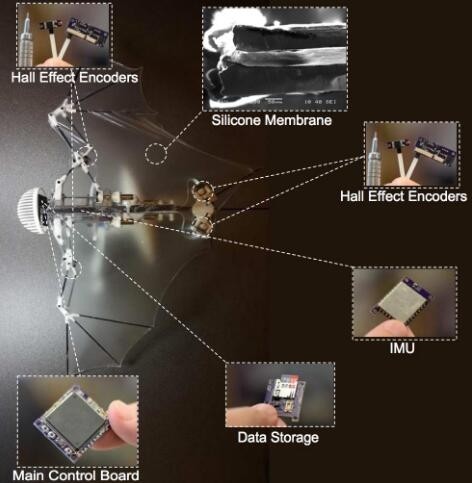
与一般动物的翅膀构造不同,蝙蝠翅膀的底层结构由变质的肌肉骨骼系统组成,DoF(自由度,包括平移、转动及振动自由度)大于40,扇动之时,其中的某些骨头甚至会主动变形。此外,蝙蝠翅膀表面还覆有一层具有柔韧度调节能力的非均质薄膜。正是这些结构赋予了蝙蝠超强的敏捷度,不过,也正是这种结构为研究人员在蝙蝠机器人的研制上增添了不少难度。
为了避免机器人的沉重和过大的研究难度,研究人员将DoF由40降到了5。如此一来,在敏捷度上,蝙蝠机器人或许远远不及真正的蝙蝠,但也拥有了其57%的飞行能力,在实际使用中基本上也是足够的了。
目前,蝙蝠机器人的成品的重量仅有93克,翼展为47cm,翼面由一层56微米厚的柔性硅胶膜制成,主要构造由3D打印而成。在用途上,除了监测建筑工地内部情况之外,该机器人还将用于监测核反应堆内部的情况。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker
 长按识别二维码关注
长按识别二维码关注
硬科技产业媒体
关注技术驱动创新
 无人机
机器人
无人机
机器人