
苹果首次发表自动驾驶技术论文:改进LiDAR系统提高3D物体识别率
这一论文揭示了苹果在自动驾驶的冰山一角。
据外媒报道,就在最近,有两名苹果计算机科学家在网上分享了一篇描述自动驾驶汽车如何使用更少的传感器来发现骑车人和行人的研究论文。
据悉,论文的题目是“End-to-End Learning for Point Cloud Based 3D Object Detection”,其中描述了苹果研发的全新软件是如何改进LiDAR系统的功能以远距离识别行人和骑车人的。
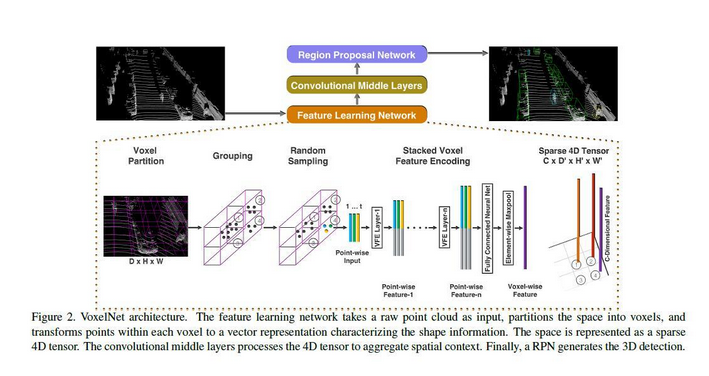
苹果的研究团队表示他们有一个叫做“VoxelNet”的方案——只使用LiDAR(光学雷达)探测。基于该方案,他们在使用LiDAR数据发现骑车人和行人时能够获得“高度可信度的结果”,并且还能在仅依靠LiDAR技术的条件下在侦测3D物体的方式上胜过其他的方式。
目前,该试验还只限于计算机模拟,并没有进行路测。不过,研究人员在论文中表示,他们认为VoxelNet的性能要大幅优于目前最先进的基于LiDAR 3D探测方法。
该论文由Yin Zhou和Oncel Tuzel完成,并于11月17日提交给了在线独立期刊《arXiv》。
关于苹果在自动驾驶的动作,我们此前已经听到过各种报道,包括4月份取得DMV(美国加州车辆管理局)颁发的自动驾驶牌照、库克大方承认苹果正聚焦于自动驾驶技术、苹果自动驾驶汽车已经开始路测等等。虽然传闻有真有假,但是苹果的确是在研发自动驾驶技术。
不过,与其他技术研发一样,苹果此前对于自身自动驾驶的技术和成果一直没有透露过丝毫消息,此次公布的论文也是其首次向人们透露自己的研发进程。从当前的情况来看,除了论文,我们或许还能够在后面看到更多苹果在自动驾驶汽车的研发进程。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker
 长按识别二维码关注
长按识别二维码关注
硬科技产业媒体
关注技术驱动创新
 自动驾驶
苹果
自动驾驶
苹果