
墨影科技杨一鸣:抛弃传统“1+1”做法,打造“一体化设计”移动协作机器人
在杨一鸣看来,移动协作机器人最是匹配人类工作环境的需求。

图 | 墨影科技创始人兼CEO 杨一鸣
机器人的“天花板”是什么?
现阶段而言,可能是人形机器人。
正式创业前的8年间,在英国攻读机器人与人工智能的杨一鸣,大多时间都在研究大型人形机器人。之后于2019年选择回国创业。
按照一般逻辑顺下来,公司创业方向大概率也是人形机器人,并且已经有投资人向杨一鸣表示愿意给他高估值和资金。
但即便如此,他并没有依照这个逻辑走下去,转而以“一体化设计移动协作机器人”为公司主要方向,也就是我们现在看到的“墨影科技”。
人形机器人“落地难”,移动协作机器人最匹配人类工作环境
为什么不选择人形机器人?
杨一鸣的答案也很简单——没有太好的落地场景。
不可否认,人形机器人是智能机器人领域的前沿代表,诸如软银的Pepper、本田的Asimo,以及波士顿动力的Atlas等等都是这一赛道的典型作品,但在前沿技术的另一端,则是令人头痛的商业落地问题。
时至今日,Asimo、Pepper已经先后于2018年、2020年被按下终止键,至于Atlas,虽然波士顿动力几经转手都没有放弃它,但该项目也还没有跳出实验室阶段。
显然,作为一家创业公司,一上来就选择人形机器人,尤其是大型人形机器人是具备不小挑战性的。
此外在杨一鸣看来,“真正的机器人,肯定是像人一样能够到不同的地方用‘手’去操作设备、做事情,这种机器人才是最匹配人类工作环境需求的,也是真正好落地的。”

在这个考量下,杨一鸣看到了AGV与机械臂产品,但在市场层面,这类产品的门槛并不高,且竞争已经颇为激烈。
所以,“综合落地应用场景、市场容量以及技术门槛后,我取了一个中间值,它既有明确的落地市场,技术门槛也相对较高,这就有了我们现在正在做的移动协作机器人。”
遵循“一体化设计”打磨产品,不做简单的1+1
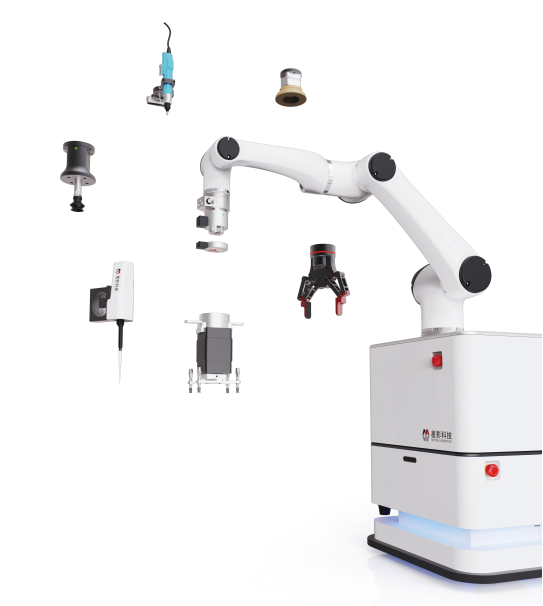
成立至今,已经2岁多的墨影科技共打造了包括自主移动机器人(AMR)、单臂移动协作机器人和双臂移动协作机器人三种形态在内的六大系列十余款型号产品。底盘负载300-600kg,机械臂末端可负载3-12kg。

其中有一款双臂移动协作机器人尤其“吸睛”,原本的机械臂部分被设计为人形机器人形态。用杨一鸣的话来说,之所以这样设计,除了包含对过往大型人形机器人研究项目的“执念”,也是为了更好地呈现出一种人性化感官,进而可以提高对客户的吸引度。
而在移动协作机器人的设计上,墨影科技采用的是“一体化设计”,这也让它的产品与其他“复合协作机器人”区别开来。
在AGV与机械臂的结合上,“复合协作机器人”的一般做法是将不同品牌或同品牌的AGV小车与机械臂产品进行“拼凑”。的确,这种做法让AGV小车与机械臂拥有了更多的功能模块,但是考虑到内部通讯协议不同等因素,二次开发的难度与成本也因此而提高。
“然而,现阶段客户对智能设备的需求是智能柔性的,最好是更低的时间与人工成本,却可以更快的部署应用于产线。”
也正是这种来自客户群体的需求,让墨影科技对于推出“一体化设计”移动协作机器人非常有信心,“这是我们有别于其他AGV公司、机械臂公司,或者协作机器人公司的地方。”

相较AGV与机械臂简单的组合,底盘、机械臂控制器各自分控,再由更高级的控制器进行协作,墨影科技的移动协作机器人可以做到“一个大脑控制手和脚”,真正实现手脚并用。也因此,墨影出货之后,产品也不需要再做太多的二次开发,在协调性和成本上更具备优势。
而为了更好地适配需求,墨影还为移动协作机器人产品设计了多个末端夹具。这么一来,当需要接连以不同姿势抓取不同物体时,它能够在视觉识别后通过自主更换夹具做到应对自如。
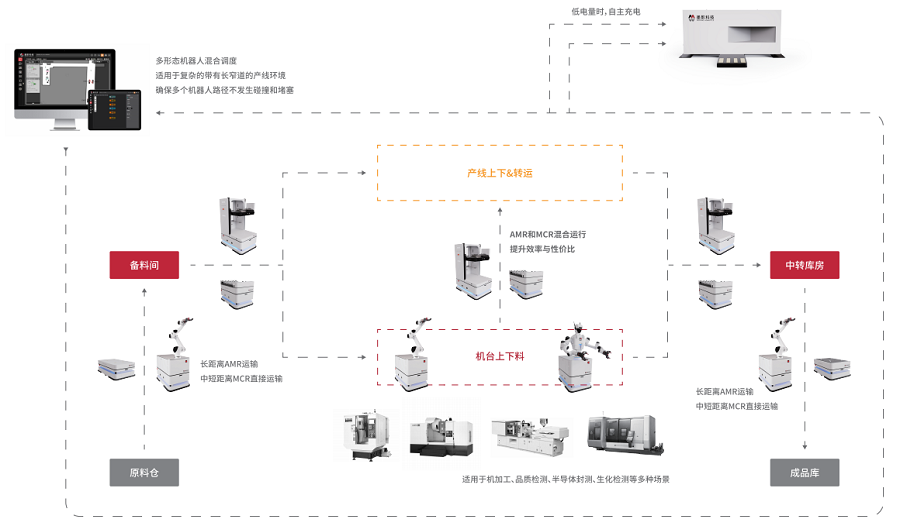
同时,墨影科技还自研了机器人管理系统,能够做到各型号AMR与移动协作机器人的同时管理,避免运行路线的相互干扰等,从而实现效率最大化。
目前,墨影科技已经做到移动底盘重复定位精度最高可至±1mm,机器人系统的抓取重复定位精度最高可达±0.1mm,落地场景主要在3C、半导体封装、生命科学领域检测等,前两个领域主要从事设备的操作、上下料以及物流搬运,最后一个领域主要是进行各种生物和化学实验,解决招人难、高风险、高知识水平人才从事简单重复作业的问题。
人机协作“走下高台”,现在还不到恶性竞争的时候
最早的“人机协作”概念落地在了协作机器人上。
协作机器人并不是一个新品,它最早出现是在2008、2009年,彼时人们对它的期望,或者对它的定义是在协作区域内,可以与人直接进行交互的机器人,这意味着它具备高度安全性,并能够与人类协同完成某项工作。
但事实证明,“大家发现这种‘人机协作’实在太难了,实际落地也很难。”
也因此,“时间来到2014年、2015年,大家发现协作机器人其实并没有以为的那么‘厉害’,也就是从那个时候开始,不管是资本关注,还是市场落地,协作机器人进入了一个低谷期。”杨一鸣说到。
不过在近两年,我们也可以明显感受到,协作机器人正迎来新的爆发期,并开始出现更多相关产品,如移动协作机器人。
从数据来看,在2019年,工业机器人全球销量同比下滑11.6%,也是自2012年来的首次下滑。但具体到传统工业机器人和协作机器人,前者全球出货量同比下滑12.56%,而后者却呈现逆势上涨,同比上升12.5%。
紧接着2020年新冠疫情全球爆发,难招人、高成本以及繁琐的防疫管控等问题,都在推动企业接纳机器人产品。
与此同时,杨一鸣也指出,“经过初期的失望之后,大家会发现,即便协作机器人、移动协作机器人只有当前的这些功能,但依旧能够解决产线上的许多问题。”
此时,人们对协作机器人的要求更多倾向于具备安全性、碰到人会自主停下,人也可以拖着机械臂末端进行调校工作等。
用杨一鸣的话来说,相较于最初的定义,眼下协作机器人的定义是“走偏”的。但是从另一个角度来讲,这也可以看作为协作机器人“走下高台”变得“接地气”,能够在3C、半导体等行业场景内高效发挥作用。
目前除了借助渠道商对外推广产品,墨影科技目前也会与集成商一起做项目。而站在移动协作机器人这一细分赛道看市场,杨一鸣也表示,“还没有到一个非常恶性竞争的阶段,目前还处于大家合力做大市场的状态。”
最后
就在今年7月,墨影科技完成了数千万元的A轮融资,保持着一年一融资的脚步。
此外,墨影科技也是科沃斯蒲公英【X加速计划】的一员。【X加速计划】是科沃斯蒲公英加速器旗下品牌,致力于通过“精准的圈子、实战的内容、高效的合作”,为行业内的企业及创始人提供用心,专业的加速服务。
截止目前,【X加速计划】已投资、加速155家机器人、人工智能企业,总估值破700亿元,融资金额近90亿。依托科沃斯及已加速企业,加速器已建立了完整的机器人、人工智能产业链和生态。
至于接下来的计划,杨一鸣透露称,公司可能会在今年底或是明年初开启新一轮融资。而在市场层面,则会基于当前既有市场再对外进行拓展。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker
 长按识别二维码关注
长按识别二维码关注
硬科技产业媒体
关注技术驱动创新
 MR
定位
技术
投资
生态
MR
定位
技术
投资
生态