
特斯拉FSD即将入华,新版本强在哪里? | 研报推荐
注:原文为太平洋证券《特斯拉的FSD时刻》,分析师:刘虹辰

在智能驾驶领域,特斯拉FSD基本代表着全球的最先进水平。随着FSD在国内的解禁,国内厂商们将迎来一次新的挑战。
本月初,特斯拉长达三年的 FSD Beta 测试计划似乎已经结束,这一变化体现在其最新版本更新说明中,其将原先的“FSD Beta”更名为了“FSD (Supervised)”。
Supervised 是“监督”的意思,而这正是FSD的核心。
那么从测试版转正,新版本的FSD究竟强在哪里?
在名为《特斯拉的FSD时刻》的行业深度报告里,分析师从三个核心逻辑的角度介绍了FSD新版本更新内容。
以下为研报内容节选:
特斯拉如何迎来FSD时刻?
1、端对端NN重塑FSD
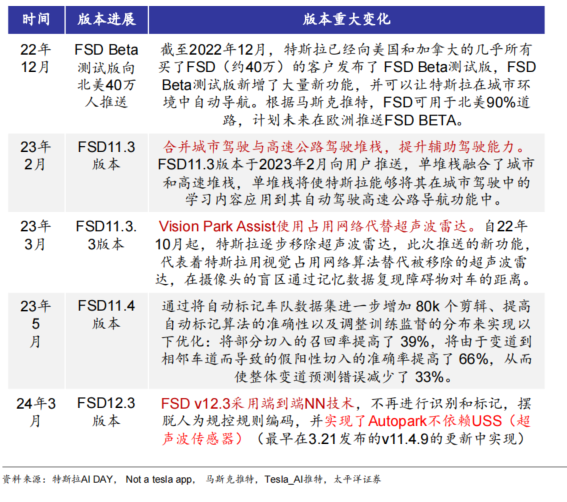
2024年3月,特斯拉先后推出FSD(Beta)12.3.2、12.3.2.1以及最新的FSD(Supervised)12.3.3版本。
相比较于FSD 11,FSD v12创新性地采用了端对端的神经网络技术(端对端NN),可以更好地理解和处理复杂驾驶环境,减少驾驶人员的干预,提高自动驾驶的精确度和自动化度。
感知-决策-执行是FSD的基本流程,在v11中,感知阶段需要通过视觉方式/雷达方式获取周围物体信息并识别和标识分类,决策阶段则依赖于事先认为编写好的控制规则。
但是v12采用了端对端NN技术,感知阶段不再需要识别和标识,决策阶段也不需要事先人为编写控制规则,只需要输入大量视频交给NN学习,就能分辨出在不同情况下需要做什么,这使得特斯拉在FSD V12中减少了100倍代码,使其更轻便、更灵活,同时在没有网络连接的情况下仍能在不熟悉的地形上工作。
目前,v12在北美的已经适配装备HW4.0的modelS、3、X和Y,在中国地区目前只有Model Y可以升级到HW4.0。
Y可以升级到HW4.0。相比HW3.0,HW4.0在算力、摄像头数量和清晰度等方面具有大幅度的提升。摄像头为8个,算力提升5倍,素有摄像头像素由120万提升至500万。
目前,特斯拉FSD累计里程指数级增长超10亿英里,剑指百亿公里。
2、新版Autopark不依赖USS
新版的Autopark(泊车功能)基于与FSD v12相同的NN技术,不再依赖USS(超音波雷达):自2022年特斯拉放弃USS而改用摄像头以来,未装备USS的新特斯拉的Autopark和Summon功能给用户带来的体验感远不如装备USS的车辆。
之前版本的Autopark具有两大主要缺陷:1)很难检测停车位并将其显示在屏幕上,而且一次只能显示一个停车位。2)停车速度通常非常慢,如果周围有其他车辆,几乎很难完成自动泊车。
而新的Autopark基于NN技术,显著改善了这两个问题,停车速度更快,不仅可以在显示屏上勾勒出停车位,还可以同时显示各种停车位-包括平行空间。此外,这次升级,特斯拉真正实现了一键泊车(TaptoPark),当驾驶员选择好停车位后,点击“开始按钮”,特斯拉的车辆能够安全地倒车进入停车位,驾驶人员只需要保持关注并随时准备在必要时取消自动停车操作即可,大幅度降低了人为干预需要、提升用户体验。
3、HW4.0芯片算力大幅提升
芯片改用更先进制程:HW4.0 FSD芯片采用三星7nm工艺,HW3.0为三星14nm工艺,新的自动驾驶芯片性能将是现款自动驾驶芯片的5倍左右。
摄像头或升级:摄像头数量或从9个减少到8个,但是摄像头的清晰度从120万像素提升到500像素,这使得HW4.0具有比3.0更强的感知能力,最远探测距离可达424米,扫除盲区和死角。
预留雷达接口:HW4.0预留了装备雷达的空间,但是modelY在出厂时并不具备雷达功能,这可能与特斯拉更加偏好视觉方案、降低车辆出厂成本等因素有关,同时也为用户提供了一定的选择空间。
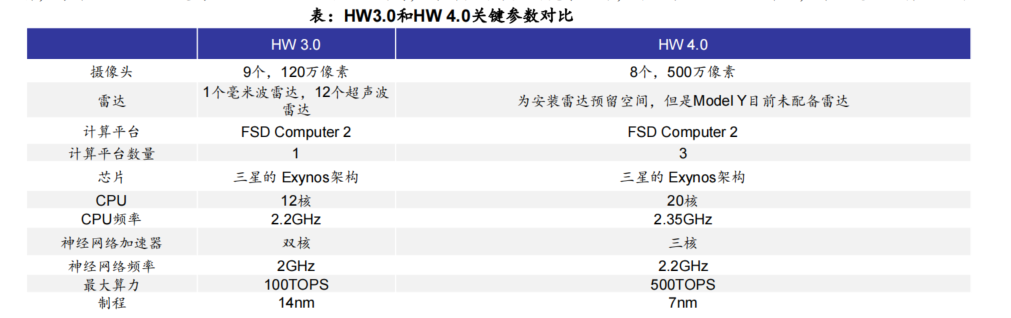
CPU内核数量提升66.67%,FSD Computer2数量增加到3个:CPU方面,HW4.0由3.0的12核,提升到了20核,内核数量提升66.67%。计算平台方面,虽然HW4.0仍然采用的是FSDComputer2,但是数量却增加到了3个。
背后的核心逻辑

1、特斯拉引领技术路径收敛
1)特斯拉引领BEV+Transformer
2021年7月AI DAY,特斯拉首次展示基于Transformer的BEV感知方案,是大模型首次用于自动驾驶,实时感知生成向量空间。
2)特斯拉Occupancy感知引领华为、理想跟随
2022年10月AI DAY,特斯拉Occupancy感知进化,不识别类别也能判断物体运动状态,引领华为GOD、理想Occupancy跟随。
3)TeslaLane感知车道拓扑,理想提前提取复杂路口特征
4)大模型自动标注效率是人工的1000-45000倍
5)特斯拉Dojo投产,国内厂商建设超算中心
2、大模型催化FSD时刻
1)大模型蒸馏有望解决车端算力不足带来效果欠佳问题
车端计算资源有限难以部署大模型,导致推理效果和泛化性能欠佳:通常来说,规模较大的模型预测效果更好,但训练时间长、推理速度慢的问题使得模型难以实时部署,尤其在自动驾驶汽车等计算资源有限的设备上,响应速度显然不够用。规模较小的模型虽然推理速度较快,但是因为参数量不足,推理效果和泛化性能没那么好。
大模型知识蒸馏给小模型,可以实现更优的性能:知识蒸馏(knowledgedistillation)是模型压缩的一种常用方法,通过构建一个轻量化的小模型,利用性能更好的大模型的监督信息来训练这个小模型,以期达到更好的性能和精度。目标检测是计算机视觉中的一个重要任务,知识蒸馏可以在不增加其计算消耗的前提下提升其表现。
2)生成式AI有望高效低价提供高质量训练数据
生成式AI可以生成廉价的海量训练数据和极端驾驶场景,高效地批量生产自动驾驶模型训练开发所需的海量数据。

3)大模型赋能智驾GPT:“语言+视觉+雷达+地图+定位”或将赋能多模态感知
3)BOM成本下降
1)特斯拉FSD引领无图城市NOA重新定义智能汽车。
特斯拉率先定义,引领国内新势力布局不依赖高精地图的城市NOA,当前量产方案处于有图向无图的过渡期。
特斯拉率先推送高速NOA:特斯拉于2016年10月率先推出高速NOA(Navigate on Autopilot)功能,定义了高级自动驾驶的进阶方向。2020年末起,蔚来、小鹏、理想相继向客户推送高速NOA。
城市NOA重新定义智能汽车:特斯拉于2020年10月,首次向早期访问程序测试人员发布了其FSDBETA测试版,支持在城市道路使用NOA,标志着汽车智能水平的重新定义。
2)成本下探:24/25年L2+/L3智能驾驶BOM成本有望下降50%
分析师认为,自动驾驶BOM成本有望大幅降低。
一是从华为ADAS系统的变化可见(v1.0 vs v2.0),传感器配置从3颗激光雷达减至1颗激光雷达,前视摄像头减少2颗,毫米波雷达从6颗减至3颗,未来车企有望从依赖多颗激光雷达转换至“纯视觉感知+1颗激光雷达监督”。二是车企从依赖高成本的高精地图转变到依托边际成本低的感知模型。
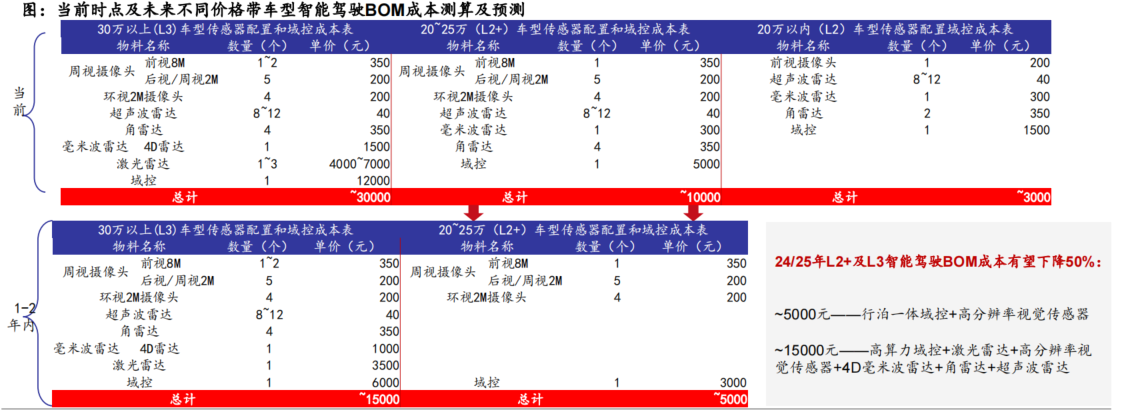
根据何小鹏,2024年小鹏自动驾驶Bom成本将下降一半。
大疆车载认为L2+智能驾驶系统的总成本(软件+硬件)占整车售价在3%~5%是合理的,认为未来合理L2+智能驾驶系统成本区间在5000元到15000元。
最后,记得关注微信公众号:镁客网(im2maker),更多干货在等你!
 微信ID:im2maker
微信ID:im2maker 长按识别二维码关注
长按识别二维码关注硬科技产业媒体
关注技术驱动创新
 14nm性能技术网络技术超算
14nm性能技术网络技术超算